巡航状态指示灯显示为白色表示系统进入待机状态,可按以下方法使用巡航功能。
激活ACC
车辆每次点火后,第一次使用ACC,必须通过
 怀挡激活。此后,在同一点火周期内,可通过方向盘左侧
怀挡激活。此后,在同一点火周期内,可通过方向盘左侧
 或
或
 按键激活。(详见“恢复ACC”内容)
按键激活。(详见“恢复ACC”内容)
ACC功能激活后,巡航状态指示灯变成绿色。
部分情况将无法激活ACC,如未系安全带、不在前进挡等,请按照仪表提示操作。
调整巡航速度
激活ACC后,可通过方向盘左侧
或
按键,主动调整巡航速度,巡航速度调整范围20km/h~150km/h。
-
短按按键,巡航速度按5km/h 的间隔递增/递减;长按按键,巡航速度将按1km/h的间隔递增/递减,随着长按时间增加,间隔递增/递减的车速值也逐渐增大。
-
通过弯道时,ACC会根据弯道大小以及当前的速度进行智能减速,弯道越急,减速越多。通过弯道后,ACC再次将车辆加速到设定的巡航速度。
 |
|
自适应巡航系统-使用方法
由于道路情况复杂(如连续弯道、急弯)、系统探测能力限制,ACC减速过弯时,无法完全保证安全通过弯道,请根据道路情况设置合适的巡航速度,切勿超速行驶。
|
调整跟车时距
激活ACC后,通过

 按键可循环调整跟车时距。
按键可循环调整跟车时距。
跟车时距共4个挡,一挡到四挡跟车距离依次变大。每次车辆重新启动后,跟车时距默认为上次设定值。
跟车控制过程中,本车与前车的时距有绿(与设定值基本一致)、黄(与设定值相比跟车较近)、红(与设定值相比跟车过近)三种颜色显示,显示为红色时请及时调整巡航速度或跟车时距,必要时接管对车辆的控制。
当前方存在可能的跟车目标时,以下场景系统可能无法及时采取制动措施:
1.跟随同车道前方目标驶入或驶出弯道;
2.相邻车道前方突然有车辆近距离切入本车道;
3.本车高速行驶,同车道前方存在静止或低速车辆;
 |
|
自适应巡航系统-使用方法3
跟车时距仅在调整时显示。
跟车时距越小,预留给您的反应时间就越短。请依据前方交通流量、实时天气和路面情况等外部因素合理调整巡航速度和跟车时距。
|
退出ACC
ACC激活后,进行如下操作或满足(不限于)如下条件,巡航系统会退出到待机状态:
ACC控制车辆停下后踩制动踏板ACC不会退出。
|
|
自适应巡航系统-使用方法4
任何情况下,如果您判断车辆存在安全风险,请果断取消或关闭ACC,立即接管并控制车辆。
|
恢复ACC
ACC由激活退出到待机时:
按下方向盘左侧
按键,ACC将重新激活并恢复至之前设定的巡航速度。
按下方向盘左侧
或下拨一次怀挡
ACC将重新激活并自动将当前车速设定为巡航速度。
|
|
自适应巡航系统-使用方法5(S203)
按
 按键恢复ACC时,恢复的设定巡航速度可能与当前行驶速度的差距较大,驾驶员须保证设定巡航速度满足当前路段的限速规则,并注意车辆的加减速变化,及时调整巡航速度。 按键恢复ACC时,恢复的设定巡航速度可能与当前行驶速度的差距较大,驾驶员须保证设定巡航速度满足当前路段的限速规则,并注意车辆的加减速变化,及时调整巡航速度。
|
驾驶员主动提速模式
ACC激活后,主动踩下油门踏板加速时,系统进入驾驶员主动提速模式(超越模式,无文字提醒),松开油门踏板后,ACC重新恢复对车辆的控制。
|
|
自适应巡航系统-使用方法6
ACC处于驾驶员主动提速模式时,车辆将被驾驶员控制,ACC不会进行加速、减速控制。
|
ACC停走控制
如果跟随的前车缓慢停下,ACC会控制车辆在前车后方停下。此后若仪表未提示“巡航驻车,恢复请按
键,注意前方安全”,ACC会控制车辆自动跟随前车起步。
ACC控制车辆停下后,出现如下情况(不限于)电子手刹将自动启动,ACC退出:
-
停车超过3min
-
打开主驾车门
-
解开主驾安全带
-
关闭ESC功能
-
退出D挡或S挡
ACC接管提醒
ACC最大能施加车辆制动能力约40%的制动力。
如果ACC制动不足以与前车保持合适的距离,仪表或车机会连续发出“请立即接管”报警(仅声音,无文字提醒),此时请立即接管车辆控制,采取避撞措施避免发生危险。


 :开启(D挡,向下拨动怀挡拨杆)或关闭(向上拨动怀挡拨杆)系统,仪表上对应的巡航控制指示灯
:开启(D挡,向下拨动怀挡拨杆)或关闭(向上拨动怀挡拨杆)系统,仪表上对应的巡航控制指示灯
 会点亮或熄灭。
会点亮或熄灭。
 :退出巡航控制,此时会保存当前巡航目标车速,以便下次恢复巡航控制。
:退出巡航控制,此时会保存当前巡航目标车速,以便下次恢复巡航控制。
 :恢复系统存储的巡航目标车速或提高巡航设定速度。
:恢复系统存储的巡航目标车速或提高巡航设定速度。
 :设定当前车速为巡航目标车速或降低巡航设定速度。
:设定当前车速为巡航目标车速或降低巡航设定速度。

 按键,巡航控制指示灯
按键,巡航控制指示灯
 点亮,定速巡航功能开启。
点亮,定速巡航功能开启。
 按键,设置当前车速为巡航速度。
按键,设置当前车速为巡航速度。
 或方向盘左侧的
或方向盘左侧的
 按键,每次提高/降低巡航目标车速5km/h。
按键,每次提高/降低巡航目标车速5km/h。
 或方向盘左侧的
或方向盘左侧的
 按键,车速持续提高/降低,松开按键后,巡航目标车速为当前实际车速。
按键,车速持续提高/降低,松开按键后,巡航目标车速为当前实际车速。
 键。
键。
 将恢复巡航控制:
将恢复巡航控制:
 开关 。
开关 。










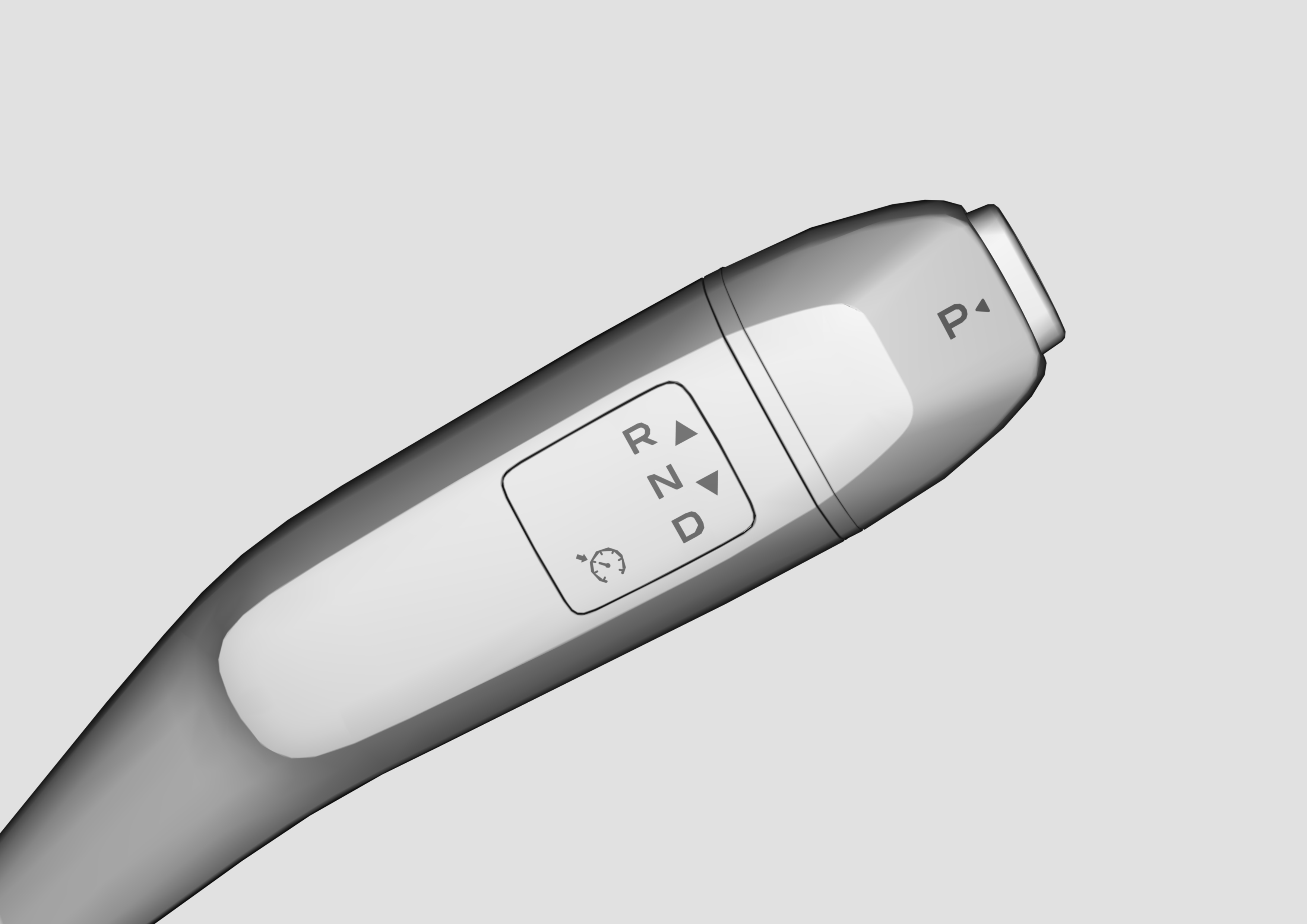 :下拨一次怀挡激活ACC。
:下拨一次怀挡激活ACC。
 :踩刹车或上拨一次怀挡取消ACC。
:踩刹车或上拨一次怀挡取消ACC。
 : 恢复ACC或提高巡航速度。
: 恢复ACC或提高巡航速度。
 : 设置ACC或降低巡航速度。
: 设置ACC或降低巡航速度。


 按键或
按键或














