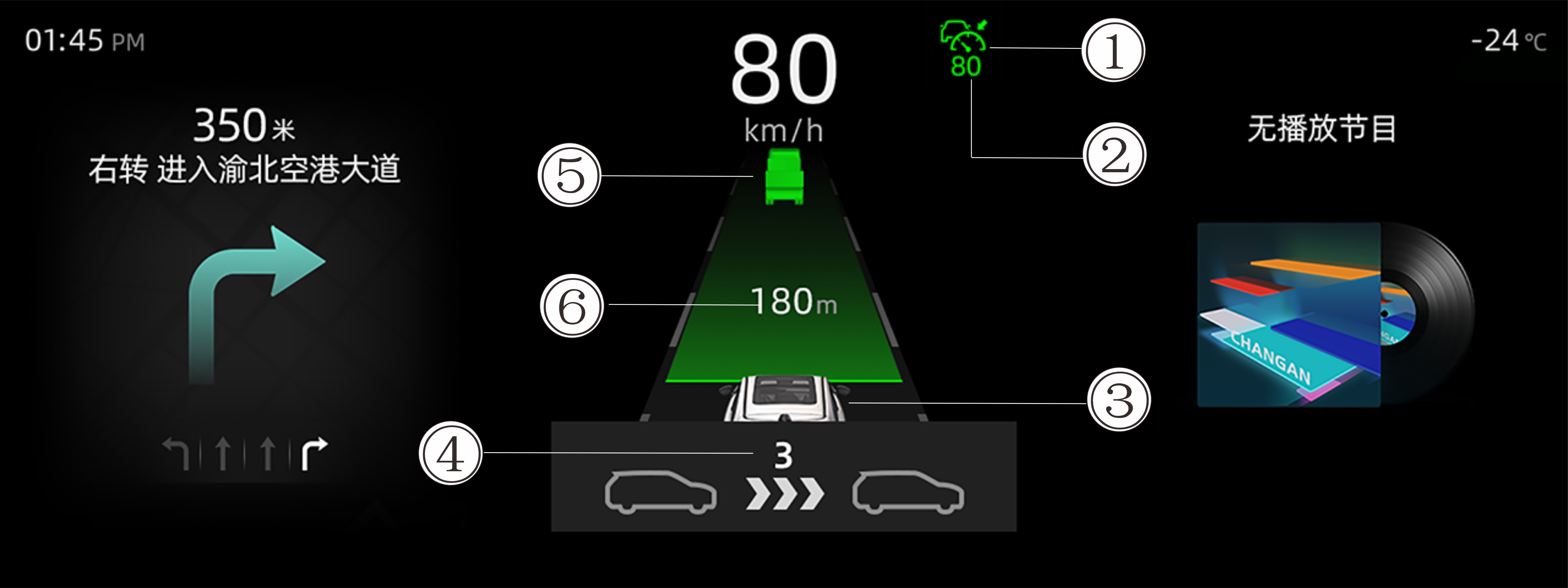
系统概述
自适应巡航系统通过安装在前保险杠下格栅后方的前毫米波雷达探测前方车辆,使车辆按照设定的速度行驶,当前方出现低于设定速度的运动车辆时,智能保持与前车的距离,并跟随前车停下/起步。
在使用ACC前,请您仔细阅读并熟知本章的全部内容。
 |
|
自适应巡航系统-系统概述1
由于实时交通、道路、天气等行驶环境复杂,雷达不能确保在各种条件下都能正确探测。在恶劣环境下请关闭ACC功能并谨慎驾驶。 ACC不能代替驾驶员进行驾驶,您必须保持对车辆的控制,谨慎驾驶,遵守限速等交通规则并对车辆驾驶负全责。 |
|
|
自适应巡航系统-系统概述2
ACC仅对本车道前方同向行驶的车辆起作用,对迎面/横向穿过/静止/缓慢移动的车辆不起作用,对行人、动物和道路上的其它物体不起作用。 ACC适合在高速公路或路况良好的道路上使用,在(不限于)如下路况、环境条件下切勿使用ACC:
|
 |
|
自适应巡航系统-系统概述
ACC工作时可能会发出制动声音、ACC控制车辆减速时,制动踏板变硬(但您仍可以通过踩下制动踏板控制车辆减速),均是正常现象。 牵引其他车辆时会降低ACC的性能。 结构性改装车辆(如降低底盘高度、改变车辆前端牌照安装板等)可能降低ACC性能,甚至导致ACC无法使用。 |
ACC系统使用的雷达在(不限于)以下情况下可能无法准确探测到目标车辆或探测时间较晚,从而无法辅助您控制车辆调整车速、车距,请及时接管对车辆的控制,必要时关闭ACC:
-
通过弯道
车辆进出弯道、在弯道内行驶时雷达可能探测不到本车道前方车辆,或探测到相邻车道的车辆。

-
装有特殊装载物/设备的车辆
雷达无法探测到车辆上装载的超出其车身侧面、后端、车顶的物品或附件。

-
前方狭窄车辆
雷达可能无法探测摩托车、自行车等狭窄车辆。
-
其它车辆变换车道
相邻车道的车辆切入本车道时,若未完全进入探测范围,雷达可能无法探测。

-
坡道
车辆进、出坡道时,雷达可能无法探测到前方车辆。

-
静止目标
雷达无法识别前方的静止车辆。

-
航向偏差大
雷达无法识别与本车存在一定夹角的车辆。


 : 激活ACC或由IACC切换到ACC。
: 激活ACC或由IACC切换到ACC。
 : 取消ACC。
: 取消ACC。
 : 恢复ACC或提高巡航速度。
: 恢复ACC或提高巡航速度。
 : 设置ACC或降低巡航速度。
: 设置ACC或降低巡航速度。
 : 调整跟车时距(稳定跟车时与前车的相对时间间隔)。
: 调整跟车时距(稳定跟车时与前车的相对时间间隔)。
 ”按键激活。此后,在同一点火周期内,可通过
”按键激活。此后,在同一点火周期内,可通过
 或
或
 按键激活。
按键激活。
 、
、
 按键,以及语音控制功能主动调整巡航速度,巡航速度调整范围20 km/h~150 km/h。
按键,以及语音控制功能主动调整巡航速度,巡航速度调整范围20 km/h~150 km/h。
 按键可循环调整跟车时距。
按键可循环调整跟车时距。

 键
键
 按键,ACC将重新激活并恢复至之前设定的巡航速度;
按键,ACC将重新激活并恢复至之前设定的巡航速度;
 或
或
 按键,ACC将重新激活并自动将当前车速设定为巡航速度。
按键,ACC将重新激活并自动将当前车速设定为巡航速度。

 按键或轻踩油门踏板控制车辆起步。
按键或轻踩油门踏板控制车辆起步。










 : 激活IACC。
: 激活IACC。
 : 激活ACC或由IACC切换到ACC。
: 激活ACC或由IACC切换到ACC。
 : 取消ACC或IACC。
: 取消ACC或IACC。
 : 恢复ACC或提高巡航速度。
: 恢复ACC或提高巡航速度。
 : 设置ACC或降低巡航速度。
: 设置ACC或降低巡航速度。
 : 调整跟车时距(稳定跟车时与前车的相对时间间隔)。
: 调整跟车时距(稳定跟车时与前车的相对时间间隔)。


 ,即可激活IACC,系统将辅助驾驶员进行加速、减速、转向控制。
,即可激活IACC,系统将辅助驾驶员进行加速、减速、转向控制。


 按键才能激活IACC。
按键才能激活IACC。
 按键才能激活IACC。
按键才能激活IACC。

